Keskeytykset¶
Osaamistavoitteet: Keskeytyksen idea, erilaisia keskeytyksiä ja niiden käyttö sulautetussa laitteessa.
Tietokoneessa keskeytys on sisäinen tai ulkoinen signaali CPU:lle, joka saa sen nimensämukaisesti keskeyttämään ajettavana olevan ohjelman suorituksen. Keskusyksikkö tallentaa tilansa ja siirtyy suorittamaan keskeytyksen käsittelyrutiinia. Kun käsittelijä on suoritettu, keskusyksikkö lataa tallennetun tilansa takaisin ja jatkaa ajossa olleen ohjelman suorittamista juuri siitä tilasta mihin jäätiin. Keskeytyksen etuna on se, että koska signaalit oheislaitteelta tai -komponentilta voivat tulla milloin vain (ts. asynkronisesti), keskusyksikön ei tarvite käyttää aikaansa kyselemään oheislaitteen tilaa.
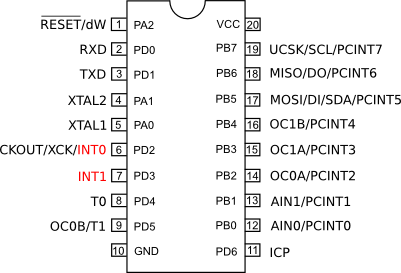
Kuvassa alla ATmelin ATtiny2313-mikrokontrollerin pinnijärjestys, jossa punaisella merkittynä kaksi ulkoista laitteistokeskeytys-pinniä. Näihin pinneihin voisimme kytkeä jonkun oheislaitteen keskeytyslinjan ja näin vastaanottaa sen lähettämät keskeytyssignaalit. Keskeytyksiä varten mikrokontrollereissa on yleensä omat pinnit, jotka on kytketty fyysisesti piirin keskeytysten hallintalogiikkaan. (Hox! Sarjaliikennepinnit RXD ja TXD.)
Keskeytyksiä on kahta tyyppiä. Keskeytys voi olla joko laitteistopohjainen (keskusyksikön sisäinen oma tai oheislaiteelta tuleva) tai ohjelmallinen. Laitteistokeskeytyksen aiheuttaa tyypillisesti jokin asynkroninen (riippumaton ohjelmien ajoituksesta) tapahtuma keskusyksikön sisällä tai oheislaitteessa. Keskeytys voi siis tapahtua CPU:ssa ajettavan ohjelman näkökulmasta millä hetkellä tahansa. Laitteistokeskeytyksiä tuottavat keskusyksikössä esim. nollalla jakaminen (virhetilanne) tai oheislaitteista mm. kiintolevy, I/O-liitynnät, näppäimistö, hiiri, jne, kertovat että olisi uutta dataa. Ohjelmallinen keskeytys aikaansaadaan erityisellä konekielen keskeytyskäskyllä, esim. INT-käsky Intelin x86 -prosessoreissa. Ohjelmistokeskeytys laukaisee keskusyksikössä keskeytyssignaalin, joka käsitellään käyttöjärjestelmässä samoin kuten muutkin keskeytyssignaalit ja sitten suoritetaan sille määritelty käsittelijäfunktio.
Keskeytyksillä on prioriteetti. Korkeamman prioriteetin keskeytys suoritetaan ensin, jos vaikkapa useita eri keskeytyksiä ilmenee samaan aikaan tai kun toista ollaan suorittamassa. Tällöin korkeamman prioriteetin keskeytys keskeyttää alemman prioriteetin käsittelyrutiniin suorituksen ja suorittaa omansa ensin. Yleensä RESET-pinnistä tulevalla laitteistokeskeytyksellä on kaikkein korkein prioriteetti. Seuraavaksi tulevat laitteistokeskeytykset, koska ne ovat tyypillisesti aikakriittisiä, esimerkiksi kovalevyltä tulevat keskeytykset. Sitten tulevat ohjelmistokeskeytykset, joille ohjelmoija voi asettaa prioriteetin. Ohjelmistokeskeytyksiä siis hallitaan ohjelmoijan määrittämällä tavalla ja nekin voivat ajaa toistensa yli.
Keskeytyksen käsittelyrutiini (engl. handler) on melkein kuin funktio, mutta sitä ei koskaan kutsuta itse ajettavasta ohjelmasta. Tämä on tärkeää siksi, että ennen keskeytyksen käsittelijän suorittamista täytyy prosessorin tila tallentaa, ja kutsumalla käsittelijää funktiona ei tätä tallennusta tehtäisi. Rutiini ei myöskään palauta mitään arvoa, mutta siinä voidaan käsitellä globaaleja muuttujia tai rekistereitä. C-kielessä toki käsittelijä toteutetaan funktiona ja RTOS:lle kerrotaan että tämä funktio on nyt käsittelijä.
Käsittelyrutiinit ovat aikakriittisiä kahdesta syystä: ne keskeyttävät ajossa olevan ohjelman ja ne voivat ajaa toistensa yli. Tällöin koko ohjelman suoritus on helppoa (virheellisesti) blokata korkean prioriteetin keskeytyksen käsittelijällä, jonka suoritus kestää pitkään. TI RTOS määrittelee, että laitteistokeskeytys saisi kestää max 5 mikrosekuntia ja ohjelmistokeskeytys luokkaa 100 mikrosekuntia. Eli käytännössä vain vähän koodia voidaan suorittaa käsittelijässä. Tästä syystä käsittelijät usein vain muuttavat rekisterien tai globaalien tilamuuttujien arvoja, esimerkiksi kertoakseen, että oheislaitteelta olisi tulossa uutta dataa. Reagointi käsittelijän muuttuneeseen tilaan tehdään sitten ajettavassa ohjelmassa, esimerkiksi if-lauseella tarkistetaan tilamuuttujan arvo. Noh, tästä lisää Tilakoneet-luentomateriaalissa..
Keskeytysten käyttö¶
Seuraavaksi käymme esimerkinomaisesti läpi useita tapoja, joilla RTOS:ssa voidaan käyttää keskeytyksiä. Esittelemme sekä ulkoisia laitteistokeskeytyksiä (pinnin ja oheislaite) sekä sisäisen laitteistokeskeytyksen (UART-sarjaliikenne).
Pinni-keskeytys¶
Aiemmalla kappaleessa esittelime pinnin tilan muutokseen reagoivan keskeytyksen. Palataanpa asiaan..
...
// Pinnin asetusmuuttuja
PIN_Config buttonConfig[] = {
Board_BUTTON0 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_NEGEDGE,
PIN_TERMINATE
};
...
// Pinnin keskeytyksen käsittelijä
void buttonFxn(PIN_Handle handle, PIN_Id pinId) {
...
}
Int main() {
...
// Kerrotaan RTOS:lle että pinnin buttonHandle keskeytyksen käsittelijä on buttonFxn
if (PIN_registerIntCb(buttonHandle, &buttonFxn) != 0) {
System_abort("Error registering button callback function");
}
...
}
Huomataan Pin_Config-rakenteessa pinnille asetettu vakio
PIN_IRQ_NEGEDGE, joka itseasiassa määrittelee että pinni voi aiheuttaa keskeytyksen! Tässä keskeytys tapahtuu, kun pinnin tila muuttuu HIGH (käyttöjännite) -> LOW (maataso), ts. laskevalla reunalla, ja siitä lähtee signaali MCU:lle. Pinnille voimme asettaa keskeytyksen myös nousevalla reunalla, eli kun tila muuttuu LOW -> HIGH, vakiolla
PIN_IRQ_POSEDGE tai molemmille reunoille PIN_IRQ_BOTHEDGES. Se, millaisen keskeytyksen oheislaite antaa, on määritelty sen datakirjassa. Keskeytyssignaalille kerromme sen käsittelijän funktiokutsussa
PIN_registerIntCb (Pin Interrupt Callback), eli nyt buttonFxn, jonne toteutamme ohjelma- ja keskeytyskohtaisen toiminnallisuuden. Sarjaliikenne-keskeytys¶
Viime luennoilla kävimme läpi tavan lukea sarjaporttidataa
UART_read-funktiolla niin, että taski jäi jumiin odottamaan dataa saapuvaksi (engl. blocking) . Tämä ei kuitenkaan ole paras tapa odottaa dataa UART-piiriltä, koska nyt.. taskimme jäi jumiin odottelemaan.. Tässä sarjaliikenne UART:n kautta on CPU:lle varsin hidas operaatio, joten ei ole syytä jumittaa taskia viemään resursseja muilta taskeilta. Nyt voimme asettaa sarjaliikenteen toimimaan ei-blokkaavalla tavalla käyttäen keskeytyksiä. UART:n asetusparametrejä siis muutetaan keskeytysmoodiin ja laaditaan käsittelijäfunktio.
...
uint8_t rxBuf[10]; // Vastaanottopuskuri
...
static void uartFxn(UArg arg0, UArg arg1) {
UART_Handle handle;
UART_Params params;
UART_Params_init(¶ms);
params.baudRate = 9600;
params.readMode = UART_MODE_CALLBACK; // Keskeytyspohjainen vastaanotto!
params.readCallback = &uart_receive; // Käsittelijäfunktio!
params.readDataMode = UART_DATA_TEXT;
params.writeDataMode = UART_DATA_TEXT;
// Otetaan UART käyttöön ohjelmassa
handle = UART_open(Board_UART, ¶ms);
if (handle == NULL) {
System_abort("Error opening the UART");
}
// Käynnistetään odotus, odotamme kunnes tulossa on yksi merkki dataa
UART_read(handle, rxBuf, 1);
while(1) {
// ikuinen looppi
}
}
// Käsittelijäfunktio
static void uart_receive(UART_Handle handle, void *rxBuf, size_t len) {
// Nyt meillä on siis haluttu määrä merkkejä käytettävissä
// rxBuf-taulukossa, pituus len, jota voimme käsitellä halutusti
// Tässä ne annetaan argumentiksi toiselle funktiolle (esimerkin vuoksi)
tehdaan_jotain_nopeasti(rxBuf,len);
// Käsittelijän viimeisenä asiana siirrytään odottamaan uutta keskeytystä..
UART_read(handle, rxBuf, len);
}
Int main() {
...
Board_initUART();
...
BIOS_start();
return 0;
}
Erona aiempaan tässä on readMode-parametrin asetus
params.readMode=UART_MODE_CALLBACK, joka muuttaa kirjaston toimintaa oleellisesti. Tässä nyt asetamme vastaanottoon callback-funktion uart_receive, jota kutsutaan kun dataa on saatavilla. Funktion määrittelyssä sen parametrien, taulukon rxBuf ja vastaanotettujen merkkien määrä len, kautta pääsemme käsiksi vastaanotettuun dataan. Kirjaston sisäisesti tähän toiminnallisuuteen liittyy myös asioita, jota ei käsitellä tällä kurssilla, kuten säikeistys. Meille riittää tieto, että uart_receive-funktio suoritetaan kun sarjaliikennedataa on saatavilla.
Oheislaitteiden keskeytykset¶
Esimerkkinä oheislaitteen aiheuttamasta ulkoisesta keskeytyksestä käytämme SensorTagiin integroitua varsin monipuolista MPU9250-sensoria. Sensoriin on integroitu asentoanturi (gyro), kiihtyvyysanturi, magnetometri. Sensoria voidaan käyttää myös kompassina. Keskeytyksen avulla sensori voisi meille kertoa, että uutta dataa on saatavilla.
SensorTag:ssa on valmiiksi asetettu ulkoinen keskeytyslinja
Board_MPU_INT MPU9250-anturille (asetettu tiedostossa CC2650STK.h). Tämän otamme käyttöön ihan samoin kuin yllämainitun I/O-pinni -keskeytyksen, mutta nyt opimme lisäksi kontrolloimaan milloin keskeytyksiä tapahtuu, uusien funktioiden avulla.// Pinnien asetus
static PIN_Config MpuPinTable[] = {
Board_MPU_INT | PIN_INPUT_EN | PIN_PULLDOWN | PIN_IRQ_DIS | PIN_HYSTERESIS, // TAI-operaatio
PIN_TERMINATE
};
...
// Taskifunktio
Void sensorTask(UArg arg0, UArg arg1) {
...
// Taskin alussa sallitaan nousevan reunan keskeytys pinniltä Board_MPU_INT
PIN_setInterrupt(hMpuPin, PIN_ID(Board_MPU_INT) | PIN_IRQ_POSEDGE); // Hox! TAI-operaatio
...
// Taskin lopuksi kielletään pinnin Board_MPU_INT keskeytykset vakiolla PIN_IRQ_DIS
PIN_setInterrupt(hMpuPin, PIN_ID(Board_MPU_INT) | PIN_IRQ_DIS); // Hox! PIN_IRQ_DIS
}
// Käsittelijafunktio
Void MpuIntFxn(PIN_Handle handle, PIN_Id pinId) {
tee_jotain();
}
int main(void) {
...
// Otetaan käyttöön pinnin ym. MpuPin
hMpuPin = PIN_open(&MpuPinState, MpuPinTable);
if (hMpuPin == NULL) {
System_abort("Pin open failed!");
}
// Asetetaan sen keskeytyksen käsittelijäfunktio
PIN_registerIntCb(hMpuPin, &MpuIntFxn);
...
}
Puretaanpas tämä esimerkki. Ensin pinnin
Board_MPU_INT alustuksessa käytämme vakiota PIN_IRQ_DIS kertomaan että pinnin keskeytys on pois päältä (disabled). Main-funktiossa asetamme keskeytykselle käsittelijäfunktion
PIN_registerIntCb, joka on tässä esimerkissä MpuIntFxn. Nyt, joka kerta kun keskeytys tulee, suoritetaan tämä funktio. Funktiossa itsessään sitten suoritamme erittäin nopeaa koodia, joka tekee mahdollisimman vähän! Tämä siksi, kun todellakin keskeytämme muun ohjelman suorituksen.. Nyt tosin alustuksessa asetimme keskeytyksen pois päältä, joten käytämme taskissa funktiota
PIN_setInterrupt asettamaan keskeytyksen ensin päälle taskin suorituksen ajaksi. Vakiolla PIN_IRQ_POSEDGE keskeytys aiheutuu pinnin nousevalla reunalla. Tyypillisesti keskeytys kannattaa laittaa päälle viimeisellä mahdollisella hetkellä koodissa. Esimerkiksi keskeytystä ''ei pidä laittaa päälle ennenkuin sensori on alustettu. Esimerkissä on vielä keskeytyksen asetus pois päälle samalla
PIN_setInterruptfunktiolla, tällöin vakio on sama kuin alustuksessa, eli PIN_IRQ_DIS.Ajastimet¶
RTOS:n tarjoaa meille myös ajastimen
Clock-kirjastossa, jolla voimme toteuttaa ajastettua tapahtumia, ts. keskeytyksiä tietyin väliajoin. Esimerkiksi voisimme ajastimen avulla kerran sekunnissa kommunikoida oheislaitteen kanssa tai vilkuttaa lediä.Clock-kirjaston esimerkki kertoo meille enemmän kuin tuhat sanaa....
#include <ti/sysbios/knl/Clock.h>
...
// Kellokeskeytyksen käsittelijä
Void clkFxn(UArg arg0) {
// Tässä esimerkkinä vain, älkää tehkö näin koska todella hidas operaatio!
sprintf(str,"System time: %.5fs\n", (double)Clock_getTicks() / 100000.0);
System_printf(str);
System_flush();
}
int main(void) {
// RTOS:n kellomuuttujat
Clock_Handle clkHandle;
Clock_Params clkParams;
Board_initGeneral();
// Alustetaan kello halutusti
Clock_Params_init(&clkParams);
clkParams.period = 1000000 / Clock_tickPeriod;
clkParams.startFlag = TRUE;
// Luodaan kello
clkHandle = Clock_create((Clock_FuncPtr)clkFxn, 1000000 / Clock_tickPeriod, &clkParams, NULL);
if (clkHandle == NULL) {
System_abort("Clock create failed");
}
BIOS_start();
return(0);
}
Jälleen kerran meillä on käytössä tietorakenne, tässä
Clock_Params. Sen jäseneen period asetamme halutun ajan tikityksinä, ts. kellojaksoina. Muistellaan aiempaa materiaalia, jossa kerrottiin että yksi tikitys vastaan meidän ajassa noin 10 mikrosekuntia. Asetamme periodiksi tässä
100000, jolla asetuksella saadaan aikaan ajastinkeskeytys NOIN yhden sekunnin välein. Tässä noin-epätarkkuus johtuu siitä, että Clock-kirjaston kello on toteutettu ohjelmallisesti ja siten sen keskeytykset ovat ohjelmistokeskeytyksiä. Ajettuamme ohjelmaa, voidaan esimerkiksi debug-logista nähdä, että kellon laskenta heittelee muutamia kymmeniä mikrosekunteja suuntaan taikka toiseen. Noh, tämä on riittävä tarkkuus meille ihmisille.. Rakenteen
startFlag-jäsenellä voidaan asettaa kello käyntiin heti Clock_create-kutsusta (startFlag=TRUE) tai erikseen käynnistettäväksi Clock_start-kutsulla (startFlag=FALSE). Kello pysäytetään Clock_stop-kutsulla. Näissä kutsuissa tarvitaan parametriksi kellon kahva, joten se on syytä esitellä globaalina muuttujana. Clock_create-kutsussa on myös meille uutta. Kutsun ensimmäinen parametri on meidän keskeytyksen käsittelyrutiini, eli tässä funktio clkFxn. Funktion ideana on osoittaa miten ohjelmistolla toteutettu kello toimii. Tässä muistetaan, että tulostus konsoli-ikkunaan, on todella hidas operaatio (MCU:n mielestä), joten tässä rikomme kirkkaasti sääntöä, ettei keskeytyksen käsittelijarutiinin suoritusajan pitäisi olla kovin pitkä. Tulostusoperaatiot (varsinkin oheislaitteelle, kuten LCD-näyttö) ovat aivan aivan aivan liian hitaita ajettaviksi keskeytysrutiineissa! Oikeampi tapa tehdä sama asia olisi tallettaa kellonaika merkkijonoja globaaliin muuttujaan ja luoda erikseen taski, joka tulostaa sen konsoli-ikkunaan / LCD-näytölle, kun tilamuuttujan arvo kertoo, että kellonaika on päivitetty keskeytyksen käsittelijässä. Clock_create-kutsun toinen parametri, timeout (tässä 1s), kertoo ajastimelle kuinka monta tikitystä se odottaa ennen keskeytyksen ensimmäistä laukaisua. Tässä ideana on, että voidaan myös toteuttaa ajastimia, jotka odottavat annettuun arvoon vain kerran ja laukaisevat sitten keskeytyksen. Näissä kelloissa Clock_params-rakenteen period-jäsen asetetaan nollaksi ja tähän timeout-argumenttiin tulee haluttu aika. Clock-kirjaston kaksi erityyppistä kelloa.
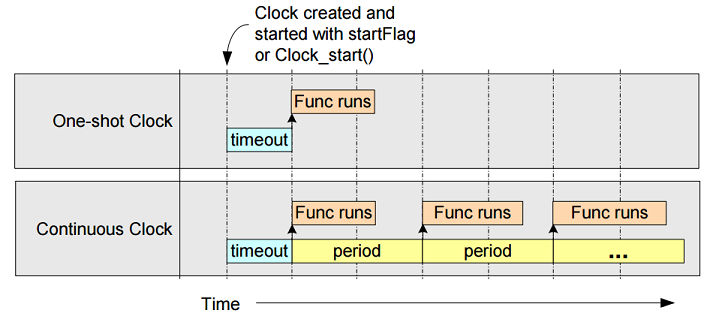
Kirjastolla voidaan luoda ohjelmaamme useita yhtäaikaisia kelloja, tarvitsee vain esitellä kahva per kello sekä asetusparametrit ja luoda kellot jokainen Clock_create-kutsulla. Huomatkaa taas, että johtuen laitteen resursseista kellojakin voi luoda liian monta. Tässä hyvä tapa voisi olla tehdä yksi kellokeskeytys pienimmälle aikavälille ja laskea käsittelijässä laskurimuuttujan avulla isompia aikavälejä!
Lisäksi, kirjasto esittelee meille jo tutun
Clock_tickPeriod-muuttujan, joka kertoo kuinka monta mikrosekuntia yksi tikitys on. Clock_getTicks-kutsulla saadaan selville ohjelman käynnistyksestä kulunut aika tikityksinä.Reaaliaikakello¶
RTOS tarjoaa myös reaaliaikakello-kirjaston
Seconds, joka pyörii meidän ihmisten ajassa. Ainoa varjopuoli tässä on, että meidän pitää itse alustaa kello kääntämällä viisarit haluttuun aikaan, ennen sen käyttöönottoa. Luotamme jälleen esimerkin voimaan.
...
#include <ti/sysbios/hal/Seconds.h>
...
Void clkFxn(UArg arg0) {
time_t nyt = time(NULL);
struct tm *aika = localtime(&nyt);
System_printf("Kello on %02d:%02d:%02d\n", aika->tm_hour+3, aika->tm_min, aika->tm_sec);
System_flush();
}
Int main() {
...
// Asetetaan reaaliaikakellon aloitusaika
Seconds_set(1475578882); // Jännempi argumentti..
BIOS_Start();
return 0;
}
Huomataan ensin main-funktiossa kutsu
Seconds_set, jolla kello asetetaan haluttuun aikaan. Nyt homma menee mielenkiintoiseksi (noo.. jonkun mielestä ihan varmasti!) Nimittäin, kellonaika annetaan Unix-aikana, eli kuluneina sekunteina sitten 1. tammikuuta 1970 00:00:00 UTC, joka ilmaistaan 32-bittisenä kokonaislukuna. Avuksemme netistä löytyy useita sivustoja, jotka tarjoavat tämän luvun meille, esimerkiksi Epoch converter (Kurssin henkilökunta ei ole missään kaupallisessa suhteessa mainittuun sivustoon). Josta selviää, että esimerkissä yllä käytetty luku 1475578882 vastaa kellonaikaa 4. lokakuuta 2016 11:01:22 GMT.
Nyt funktiossa clkFxn on myös uusia asioita, kun käytämme time.h-standardikirjastoa. Itseasiassa tässä RTOS tarjoaa oman time-standardikirjaston toteutuksen, joka alustuu sekin samalla Seconds_set()-kutsulla. Kirjasto tarjoaa käyttöömme funktion
time(NULL), jolla voimme kysyä kuluneen reaaliajan 32-bittisenä kokonaislukuna. Lisäksi time-kirjasto tarjoaa joukon funktioita, joilla tämä kokonaisluku voidaan muuntaa luettavampaan muotoon. Yllä käytämme localtime-kutsua, jolla täytämme struct tm-rakenteen, josta saamme irti mm. tunnit, minuutit ja sekunnit tulostusta varten. Huomatkaa osoitinesitys rakenteelle. Yllä joudumme vielä asettamaan aikavyöhykkeen varsin typerästi
tm_hour+3, mutta tämä ratkaisu menettelee meille. Hox! Seconds-kirjasto ei ole käytettävissä CCS Cloud-ohjelmointiympäristön kautta.
Lopuksi¶
Sulautettuna laitteena SensorTag on varsin tehokas, ja RTOS abstrahoi meiltä monia asioita. Esimerkiksi Arduinoissa, tai laitteissa joissa ei ole käyttöjärjestelmää, sarjaliikenteen odottelu olisi katastrofaalisen hidasta laitteen toiminnan kannalta. Jos näissä laitteissa toteutetaan sarjaliikenne ilman keskeytystä, joudutaan kyselemään koodissa sarjaporttirekisteriltä tasaisin väliajoin, että onko uutta dataa, joka hidastaa muun ohjelman toimintaa. Noh, Arduinoissa laitteen suunnittelun päämäärä onkin ollut helppo ohjelmoitavuus.
Sulautetuissa laitteissa ajastettuja tapahtumia toteuttaa MCU:hun integroitu laskuripiiri (tuttu Digitaalitekniikan kursseilta), joka laskee jokaisella systeemin kellonjaksolla yhden numeron eteenpäin, kunnes törmää ohjelmallisesti asetettuun maksimiarvoon ja aloittaa jälleen laskennan nollasta. Kaikki muut aika-arvot voidaan johtaa tästä arvosta, kun tiedetään systeemin kellotaajuus (megahertsejä).
RTOS abstrahoi tämänkin toiminnan ja (meidän tarpeisiin) keskeytysten käytön varsin yksinkertaiseksi käsittelijän kirjoittamiseksi funktiona. Emme edes välttämättä tiedä, toimiiko kirjasto keskeytyspohjaisesti vai onko kyseessä vain ohjelmafunktio. Tätä varten on syytä lukea kyseisen kirjaston dokumentaatiosta mistä on kyse. Muutoin saatamme tietämättämme toteuuttaa liian raskaan käsittelijän keskeytykselle.
Anna palautetta
Kommentteja materiaalista?