Oheislaitteista¶
Osaamistavoitteet: SensorTagin eri oheislaitteiden käyttö, graffikan tuottaminen näytölle, eri anturit sekä virranhallinta.
Tälle sivulle on kootusti kerätty materiaalia miten käyttää SensorTag:n eri oheislaitteita.
Valmistajan materiaalia¶
Alla annettu materiaali on englanninkielistä.
Ohjelmointiopas¶
Valmistajan oma opetussivu laitteen ohjelmointiin. Tämä vain tiedoksi, ei tarvita kurssilla!
Manuaalit¶
Englanninkielisiä varsin teknisiä käyttöoppaita.
- TI-RTOS 2.20 User’s Guide
- SYS/BIOS (TI-RTOS Kernel) v6.46 User's Guide
- Simplelink Technical Reference Manual
Valmiita kirjastoja¶
RTOS:n kirjastojen dokumentaatio:
- Ajuri-kirjastot
- Sisältää mm. koodiesimerkkejä
- Opetelkaa etsimään täältä sivulta tietoa!
Jos käytätte materiaalia jostain muualta (netistä tms), niin huomatkaa, että meillä on käytössä RTOS versio 2.20.00.06.
Esimerkkiprojekteja¶
Seuraavien linkkien kautta löydät esimerkkiprojekteja SensorTagille:
- CCS:n ja CCS Cloud:n pääikkunan
Project-menusta kohdastaExamples...aukeaa TI Resource explorer. - Etsitään vasemman reunan menuvalikosta SensorTag-laite.
- Menuhierarkia on seuraava: Software -> TI-RTOS for CC2650 -> Development Tools -> CC2650 SensorTag
- Huom! Vaikka esimerkit ovat uudemmalle RTOS:n versiolle, useimmat niistä toimivat myös meidän versiossa
- Projekti aukeavat klikkaamalla, ja ne voi käyttöliittymästä siirtää (Import-toiminnolla) suoraan CCS (Cloud):n projekteiksi ja ottaa sitä käyttöön.
Nämä vain tiedoksi, kannattaa vilkaista näitä esimerkkejä etsiessä tai jos haluaa toteuttaa muutakin kivaa laitteelle. Kurssilla annamme opiskelijoille valmiin projekti-aihion, jonka päälle laboratorioharjoitus ja lopputyö tehdään.
(Huomatkaa! Jotkut kurssilla käsittelemättä jätetyt laitteen ominaisuudet vaativat laitteen hardiksen konfigurointia ennen käyttöä CCS:n konfigurointi-ikkunan kautta. Tästä annamme tarvittaessa esimerkin.)
LCD-näyttö¶
Alla esimerkkejä, miten näyttöä käytetään. Näytölle voidaan siis tulostaa tekstiä, vääntää pikseligrafiikkaa tai näyttää (mustavalko)kuvia.
Näytön kanssa käytämme kirjastoja: Display.h Näytön alustukseen ja tekstin tulostamiseen ruudulle ja DisplayExt.h-kirjastoja grafiikan tuottamiseen ruudulle.
Ruudulle mahtuu 16 x 16 merkkiä tekstiä. Tekstin tulostaminen näytölle menee seuraavasti.
...
#include <ti/mw/display/Display.h>
...
// Taskifunktio
Void displayTask(UArg arg0, UArg arg1) {
// Alustetaan näyttö nyt taskissa
Display_Params params;
Display_Params_init(¶ms);
params.lineClearMode = DISPLAY_CLEAR_BOTH;
// Näyttö käyttöön ohjelmassa
Display_Handle hDisplayLcd = Display_open(Display_Type_LCD, ¶ms);
// Tulostetaan ruudulle koordinaatteihin (5,3) merkkijono
if (hDisplayLcd) {
Display_print0(hDisplayLcd, 5, 3, "Hello LCD!");
// Näytä teksti ruudulla 5s ajan
Task_sleep(5 * 1000000/Clock_tickPeriod);
// Tyhjennä näyttö
Display_clear(hDisplayLcd);
}
}
Taskin toiminta on muutoin meille jo tuttua, tietorakenteineen ja
Display_open-kutsuineen, mutta huomataan funktio Display_print0, jolla voidaan tulostaa näytölle tekstiä. Funktio ottaa argumenteikseen myös koordinaatit (rivi, sarake) ruudulla, eli esimerkissä (5,3). Funktiolle voimme tietenkin antaa muotoillun argumentin merkkijonossa, joka mahdollistaa esimerkiksi kellonajan tulostamisen ruudulla Keskeytys-luennon esimerkin mukaisesti.....
sprintf(str,"%02d:%02d:%02d",aika->tm_hour+3, aika->tm_min, aika->tm_sec);
Display_print0(hDisplayLcd, 0, 0, str);
...
Itseasiassa kirjastossa on myös funktiota
Display_print1()..Display_print5(), jossa numero kertoo mahdollisten argumenttien lukumäärän tulostettavassa merkkijonossa. Mutta, näillä funktioilla emme saa aivan kaikenlaista tulostusta tehtyä, joten enemmän taiteellisia vapauksia saa tulostamalla ensin sprintf-funktiolla merkkijonoon ja pukkaamalla sen sitten ruudulle. Display_clear-funktio sitten yllättäen tyhjentää ruudun.Display_clearLines-funktiolla voimme tyhjentää osan ruutua, eli valitut rivit. Tutustu ym. linkin kautta mitä kaikkea toimintoja näyttökirjastot tarjoavat!
Pikseligrafiikkaa¶
Grafiikkakirjasto tarjoaa meille joukon funktioita pikseligrafiikan tuottamiseen näytölle, vilkaise grlib.h-kirjastoa kohtaa Functions. Näytön resoluutio on 96 x 96 pikseliä.
Esimerkiksi, piirretään
X viivoilla ruudun poikki....
#include <ti/mw/display/Display.h>
#include <ti/mw/display/DisplayExt.h>
...
// Taskifunktio
Void displayFxn(UArg arg0, UArg arg1) {
Display_Params params;
Display_Params_init(¶ms);
params.lineClearMode = DISPLAY_CLEAR_BOTH;
Display_Handle hDisplayLcd = Display_open(Display_Type_LCD, ¶ms);
if (hDisplayLcd) {
// Grafiikkaa varten tarvitsemme lisää RTOS:n muuttujia
tContext *pContext = DisplayExt_getGrlibContext(hDisplayLcd);
if (pContext) {
// Piirretään puskuriin kaksi linjaa näytön poikki x:n muotoon
GrLineDraw(pContext,0,0,96,96);
GrLineDraw(pContext,0,96,96,0);
// Piirto puskurista näytölle
GrFlush(pContext);
}
}
}
Tässä nyt uutta on, että tarvitsemme ensin grafiikkakirjaston kahvan näyttöön, osoitinmuuttujaan
pContext. GrLineDraw-funktio ottaa parametrikseen kahvan ja viivan alku- ja loppukoordinaatit. Kirjasto tarjoaa muitakin funktiota, mm. GrCircleDraw ja GrRectDraw, jne.Piirto-operaatiot menevät puskuriin odottamaan varsinaista näytöllepiirtoa, joka tehdään
GrFlush-funktio-kutsulla. Yleensä on edullista tehdä useita piirto-operaatiota valmiiksi puskuriin ja piirtää ne kerralla näytölle, koska se on aikaavievä operaatio. Mutta tämä asia on tietenkin ohjelmoijan päätettävissä. Kuvia näytölle¶
Kuva piirtämiseen näytölle on oma funktionsa, jonka käyttäminen on hieman monimutkaisempaa.
...
/* Kuva: 8x8 pikselin bitmap (bitti 1 pikseli, bitti 0 tausta)
11111111
10000001
10000001
10000001
10000001
10000001
10000001
11111111
*/
const uint8_t imgData[8] = {
0xFF,
0x81,
0x81,
0x81,
0x81,
0x81,
0x81,
0xFF
};
// Mustavalkoinen kuva: värit musta ja valkoinen
uint32_t imgPalette[] = {0, 0xFFFFFF};
// Kuvan määrittelyt
const tImage image = {
.BPP = IMAGE_FMT_1BPP_UNCOMP,
.NumColors = 2,
.XSize = 1,
.YSize = 8,
.pPalette = imgPalette,
.pPixel = imgData
};
...
Void taskFxn(UArg arg0, UArg arg1) {
...
if (pContext) {
GrImageDraw(pContext, &image, 0, 0);
GrFlush(pContext);
}
}
...
Ensiksi, funktiolle
GrImageDraw annetaan argumenteiksi kahva, kuva bitmap-muodossa, kuvan paikan x-koordinaatti ja y-koordinaatti. Okei tähän asti.Bitmapin määrittely on sitten monimutkaisempaa. Sille tarjotaan rakenne
tImage-rakenne, jossa on seuraavat jäsenet:BPP = IMAGE_FMT_1BPP_UNCOMPTässä kuvakoodaus, jossa yksi bitti bitmapissa vastaa yhtä pikseliä ruudullaNumColors = 2Värejä kaksiXSize = 1Kuvan leveys tavuina!YSize = 8Kuvan korkeus tavuina!pPalette = imgPaletteVäripalettipPixel = imgDataKuvan bitmap
Kuvan kompressointiin tarjotaan muitakin koodauksia, jotka vievät vielä vähemmän muistitilaa, mutta meille riittänee tässä koodaus bitti per pikseli. Tästä löytyy esimerkki RTOS:n esimerkkikoodeista Display-hakemistosta.
Näytön käyttöönotto¶
Näytön käyttöönotossa on yksi kommervenkki, joka meidän täytyy vielä tietää. Valitettavasti SensorTag ei mahdollista sekä näytön että UART:n yhtäaikaista käyttöä, johtuen siitä että ne käyttävät samoja I/O-pinnejä.
Tästä syystä joudumme ohjelmistoprojektiimme määrittelemään vakion
BOARD_DISPLAY_EXCLUDE_UART, joka ottaa UART-sarjaliikenteen pois päältä kun haluamme käyttää näyttöä. Se lisätään Board.h tiedoston alkuun seuraavasti:...
#ifdef __cplusplus
extern "C" {
#endif
// Tämä rivi lisätään itse tähän
#define BOARD_DISPLAY_EXCLUDE_UART
#include <ti/drivers/Power.h>
...
Tämä vakio on asetettu valmiiksi laboratorioharjoitus-materiaalissa.
Aina kun tarvitsemme UART:ia, voimme kommentoida rivin piiloon otsikkotiedostosta. i2C-sarjaliikenteeseen näytön käytöllä ei ole vaikutusta.
Huomatkaa! Näytön jatkuva päälläpitäminen, kun laite toimii patterilla, syö patterin nopeasti max. vuorokaudessa!
Sensoreista¶
Seuraavassa kootusti informaatiota laitteen eri sensoreista, niiden tarvittavista rekistereistä ja kommunikoinnista i2c-väylän kautta. Oheiskomponentteihin on integroitu jopa useita eri antureita, mutta tässä esitämme vain niiden pääasiallisen käyttötarkoituksen. Jos haluatte käyttää näitä muita antureiden ominaisuuksia, tulee niiden tiedonsiirto itse selvittää datakirjasta / kirjastoista. Kurssin henkilökunta ainakin yrittää auttaa tässä..
Esimerkkejä miten i2c-viestejä luodaan löytyy materiaalista Sarjaliikenne.
Toteutus¶
Laboratorioharjoituksessa jaetaan SensorTagille ohjelma-aihio, jossa on valmiiksi toteutettu eri sensoreille omat kirjastot, jotka sisältävät funktiot sensorien alustamiseen ja datan kyselyyn. Nämä valmiit funktiot löytyvät
sensors-hakemistosta. Jokaiselle sensorille on kirjastossa kaksi funktiota. Alla funktion nimessä sana
xx tarkoittaa sensorin nimeä, esimerkiksi bmp280. xx_setup, joka konfiguroi sensorin ja joissain tapauksissa laittaa sen päälle mittaamaan.xx_get_data, jolla sensorilta kysytään dataa, ts. sensorien rekisterien arvoja. Funktio ottaa sensoridatan tyypistä riippuen eri tyyppisiä parametrejä.
Tosin, kirjastojen toteutukseen on jätetty aukkoja, jotka teidän tulee itse täydentää. Selvittäkää aluksi siis mistä kooditiedostosta löytyy nämä funktiot ja täydentäkää ensin sen sisäinen toiminnallisuus!
- Funktioissa ei anneta bittioperaatioita, joilla rekisterien arvoista tulkitaan mittausarvot esiin. Tämä opiskelijoiden tulee itse tehdä ao. rekisterikuvausten perusteella!
Kommunikointi sensorin kanssa. Kaikille näille funktioille annetaan parametriksi
i2c-kahva, jonka olemme pääohjelmassa ensin aukaisseet vastaavalla Open-funktiolla.- * Funktioissa ei anneta valmista i2c-viestin tietorakennetta, eli se pitää itse täyttää!
- i2c-kommunikoinnin toteutus on tehty osittain valmiiksi.
- Muistakaa esitellä viestipuskurit
txBufferjarxBuffer.
Sensorit käyttävät isamaa 2c-yhteyttä
Board_I2C_TMP-pinnistä, joka on ohjelma-aihiossa valmiiksi alustettu. Poikkeus on MPU9250-sensori, jolle luodaan i2c-yhteys erillisiin pinneihin ja siihen oma kahva. Alla lisätietoa ja esimerkkikoodi MPU9250:n käytöstä löytyy opiskelijoiden tiedostonjaossa.Datakirjan lukeminen¶
Kurssilla ei ole tarkoitus syventyä datakirjojen sielunmaailmaan. Esimerkkikoodeja ei ole mitenkään optimoitu, vaan ne tekevät minimitoteutuksen malliin karvalakki.
Datakirjassa (ja sen kuvissa) alla on annettu bitin numerot, esimerkiksi 16-bittisessä luvussa bitit
15..0. Tämä järjestys tarkoittaa sitä, että eniten merkitsevä bitti on ensimmäisenä ja vähiten merktisevä bitti viimeisenä. Vastaavasti kun luemme sensorin rekistereistä dataa, on ensimmäisen lukemamme tavu siis eniten merkitsevä tavu ja tavut sen jälkeen alenevassa järjestyksessä. Tämä meidän täytyy sitten rekisterin numeroarvoja muodostaessa muistaa myös. Joissain datakirjoissa annetaan mittayksikölle muunnos: x.x per LSB. Tämä tarkoittaa anturin resoluutiota (ts. tarkkuutta), eli pienintä suureen eroa minkä anturi pystyy tunnistamaan. Nyt kun rekisterin lukuarvo on
n, saadaan mitattu arvo laskettua n * x.x. TMP007: Lämpötila¶
Anturin TMP007 datakirja. Josta löydämme ainakin rekisterikuvaukset. Tästä meitä kiinnostaa erityisesti rekisteri 0x03, joka pitää sisällään mittaustuloksen. Kaivetaanpa tarkemmin esille mitä rekisteri pitää sisällään.
Otsikkotiedosto on
tmp007.h, joka löytyy sensors-hakemistosta. 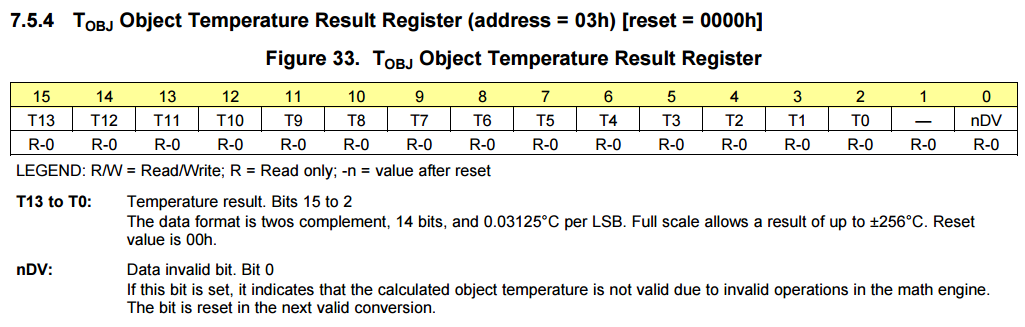
Rekisterin kuvaus kertoo, meille että se palauttaa lämpötiladataa 16-bittisenä lukuna, biteissä 15-0 (merkitty keltaisella). Lisäksi kuvauksessa kerrotaan että lämpötila-arvo (Temperature result) on tämän luvun biteissä 15-2, jotka on merkitty
T13-T0. Bittiä 1 ei käytetä - ja bitti 0 nDv olisi tarkistusbitti sille, että onko bittien T13-T0 arvo validi. Näistä biteistä T13-T0 meidän nyt pitää sitten itse selvittää varsinainen lämpötilan arvo, kun LSB vastaa 0.03125 astetta Celsiusta.
Kommunikointi¶
Käytetään seuraavia parametrejä:
- Anturin i2c-osoite:
Board_TMP007_ADDR - Datarekisterin osoite:
TMP007_REG_TEMP - Datan kysely
- Lähetys
yksi tavu, jossa datarekisterin osoite - Vastaanotto
kaksi tavua: MSB + LSB
OPT3001: Valoisuus¶
Anturin OPT3001 datakirja. Josta löydämme seuraavat rekisterikuvaukset.
Otsikkotiedosto on
opt3001.h, joka löytyy sensors-hakemistosta. 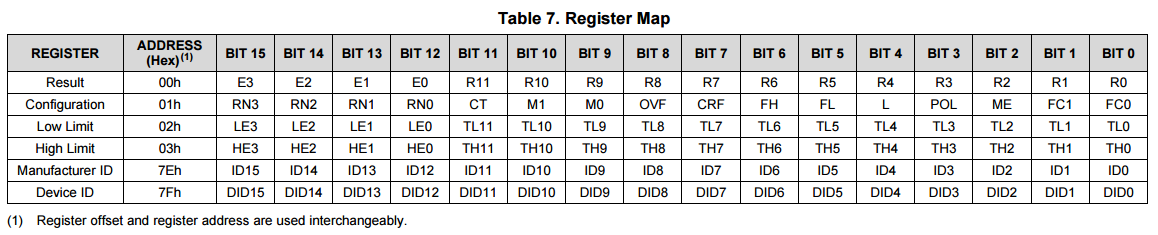
Tästä meitä kiinnostaa Result-rekisteri. Rekisterin sisällöstä lasketaan valaistusvoimakkuus (luksi) seuraavasti.

Kommunikointi¶
Käytetään seuraavia parametrejä:
- Anturin i2c-osoite:
Board_OPT3001_ADDR - Datarekisterin Result osoite:
OPT3001_DATA_REG - Datan kysely
- Lähetys
yksi tavu, jossa datarekisterin osoite - Vastaanotto
kaksi tavua: MSB + LSB
BMP280: Ilmanpaine¶
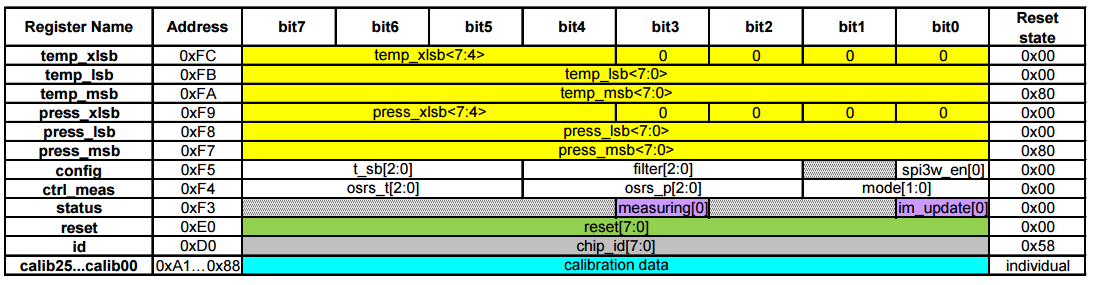
Ilmanpaine-anturimme on BMP280, jolle datakirja.
Otsikkotiedosto on
bmp280.h, joka löytyy sensors-hakemistosta. Nyt olemme kiinnostuneita kuudesta rekisteristä: press_msb, press_lsb ja press_xlsb sekä temp_msb, temp_lsb ja temp_xlsb. Joista meidän täytyy itse muodostaa kaksi 20-bittistä lukua tässä järjestyksessä, eli nyt vähiten merkitsevät bitit ovat rekisterin pres_xlsb bitit.
Mittausarvon irrottaminen biteistä on tällä sensorilla menee seuraavasti. Tässä mm. huomioidaan lämpötila-kompensaatio, joten tarjoamme nämä muunnosfunktiot valmiiksi
bmp280.c-koodissa. - Ensin muodostetaan 20-bittiset luvut ilmanpaineelle ja lämpötilalle.
- Sitten kutsutaan funktiota
bmp280_temp_compensationlaskemaan lämpötilakompensaatio ja oikea ymmärrettävä lämpötila-arvo. - Lopuksi funktio
bmp280_convert_presmuuntaa ilmanpainearvo yksikköönpascal. Mutta yleisesti ilmanpaineen yksikkönä käytetäänhehtopascal:ia, eli satakertaista arvoa.
Kommunikointi¶
Käytetään seuraavia parametrejä:
- Anturin i2c-osoite:
Board_BMP280_ADDR - Datarekisterin Press_msb osoite:
BMP280_REG_PRES - Datan kysely
- Lähetys
yksi tavu, jossa datarekisterin Press_msb osoite - Vastaanotto
kuusi tavua: Jotka sisältävät peräkkäiset rekisterien Press_msb, Press_lsb, Press_xlsb, Temp_msb, Temp_lsb ja Temp_xlsb
HDC1000: Ilmankosteus¶
------------------------
SENSORI VAATII KESKEYTYSPOHJAISEN DATAN KYSELYN, JOTA EI OLE AJURIIN TOTEUTETTU, JOTEN ÄLKÄÄ KÄYTTÄKÖ!
------------------------
SENSORI VAATII KESKEYTYSPOHJAISEN DATAN KYSELYN, JOTA EI OLE AJURIIN TOTEUTETTU, JOTEN ÄLKÄÄ KÄYTTÄKÖ!
------------------------
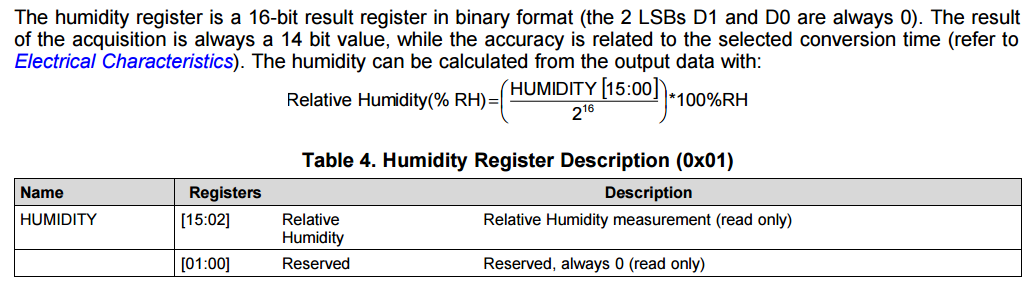
Ilmankosteus-anturimme on HDC1000, jolle datakirja.
Otsikkotiedosto on
hdc1000.h, joka löytyy sensors-hakemistosta. Nyt olemme kiinnostuneita 16-bittisestä rekisteristä Humidity (osoite 0x01). Rekisterin ensimmäinen tavu on siis eniten merkitsevä. Datakirjan sivulta näemme myös kaavan, jolla rekisterin arvosta saadaan laskettua suhteellinen kosteus-arvo.
Kommunikointi¶
Käytetään seuraavia parametrejä:
- Anturin i2c-osoite:
Board_HDC1000_ADDR - Datarekisterin Humidity osoite:
HDC1000_REG_HUM - Datan kysely
- Lähetys
yksi tavu, jossa datarekisterin osoite - Vastaanotto
kaksi tavua: MSB + LSB
MPU9250: Liikeanturi¶
Sensortagiin on integroitu liikeanturi (gyro, kiihtyvyys, magnetometri) MPU9250, joka on todella monimutkainen laite käyttää: kymmeniä rekistereitä, monimutkaiset kalibrointialgoritmit, yms. Sen vuoksi tarjoamme komponentille valmiissa kirjastossa muunnosfunktiot ja kaiken muun, paitsi datan kyselyn i2c-väylän kautta.
MPU9250-sensori vaatii alustaessa kaksi lisäjuttua. Ensin sensoriin tulee kytkeä virrat asettamalla pinni
Board_MPU_POWER päälle vakiolla Board_MPU_POWER_ON. Lisäksi sensori vaatii toisen i2c-väylän käyttöönoton josta koodiesimerkki löytyy täältä. Tätä varten koodissa on määritelty tietorakenne i2cMPUCfg, jonka jäseniksi haluamme pinnit Board_I2C0_SDA1 ja Board_I2C0_SCL1. Tämä tietorakenne annetaan sitten i2cMPUParams-tietorakenteelle parametriksi. MPU:ta varten jouduimme siis luomaan toisen i2c-konfiguraation. Esimerkkikoodin ohjelmassa idea on, että käytämme vuorotellen eri pinneissä olevia i2c-väyliä kyselemään MPU9250:n ja muiden sensorien dataa! Varsin hyödyllinen esimerkki siis. Koodatessa muistetaan sitten sääntö, että kaikki mikä avataan myös suljetaan.Rekistereistä meitä kiinnostaa ao kuvassa 14 rekisteriä, alkaen rekisteristä
ACCEL_XOUT_H (osoite 0x3B) ja päättyen rekisteriin GYRO_ZOUT_L (osoite 0x48). Kiihtyvyysanturin kolmen akselin mittausarvot ovat rekistereissä nimeltä ACCEL_* ja vastaavasti gyron GYRO_* ja molemmille mitataan kolmen suunan arvot X, Y ja Z. Keskellä on myös rekisterit TEMP_OUT_*, mutta niitä ei tarvitse käyttää.Nyt, molempien anturien kaikkien kolmen suunnan rekisterien raakadata-arvot per akseli taulukossa (
raw_data) ovat peräkkäisiä 8-bittisiä lukuja, joista pitää muodostaa yksi 16-bittinen luku. Rekisterin nimessä *_H tarkoittaa ylempää tavua ja *_L alempaa tavua, jotka yhdistetään sopivalla bittioperaatiolla (tässä vaiheessa se pitäisi jo tietää..). Kirjaston koodissa (mpu9250.c) tällä tavalla muodostetut 16-bittiset arvot pitää mpu9250_get_data-funktiossa vielä sijoittaa taulukkoon data, josta niitä jälkikäsitellään ihmisen ymmärtämien mittausarvojen laskemiseksi raakadatasta. 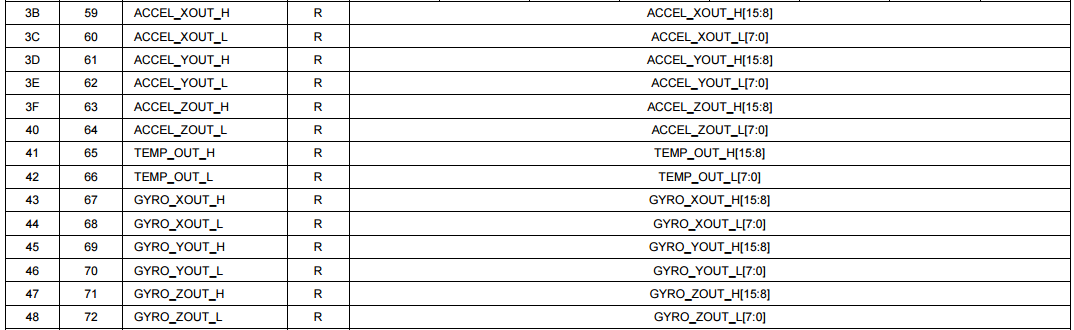
Huom! Rekisterikuvassa rekisterijärjestys on ylhäältä alaspäin. Olkaa tarkkana järjestyksestä, eli miten päin rekistereitä käytetään koodissa!
Kommunikointi¶
Käytetään seuraavia parametrejä:
- Anturin i2c-osoite:
Board_MPU9250_ADDR - Datarekisterin Accelerometer X High osoite:
ACCEL_XOUT_H - Datan kysely
- Lähetys
yksi tavu, jossa datarekisterin osoite - Vastaanotto
14 tavua: Tavut ACCEL_XOUT_H - GYRO_ZOUT_L, jotka sisältävät kiihtyvyys- ,lämpötila- ja gyro-mittausarvot yo. kuvan järjestyksessä.
Virtakytkin¶
Otsikkotiedosto on
mpu9250.h, joka löytyy sensors-hakemistosta.RTOS tarjoaa mahdollisuuden käyttää painonappeja myös laitteen virakytkimenä. Tämähän on varsin järkevää patterin säästämiseksi, joten ensitöiksi toteutamme kyseisen ominaisuuden ohjelmaamme!
Valjastamme virtakytkimeksi napin
Board_BUTTON1, eli sen napin, jolle kumisuojuksessa on virtakytkimen kuva. Virtakytkin otetaan käyttöön seuraavasti.#include <ti/drivers/Power.h>
#include <ti/drivers/power/PowerCC26XX.h>
...
static PIN_Handle hButtonShut;
static PIN_State bStateShut;
PIN_Config buttonShut[] = {
Board_BUTTON1 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_NEGEDGE,
PIN_TERMINATE
};
PIN_Config buttonWake[] = {
Board_BUTTON1 | PIN_INPUT_EN | PIN_PULLUP | PINCC26XX_WAKEUP_NEGEDGE,
PIN_TERMINATE
};
// Napinpainalluksen käsittelijäfunktio
Void buttonShutFxn(PIN_Handle handle, PIN_Id pinId) {
// Näyttö pois päältä
Display_clear(hDisplayLcd);
Display_close(hDisplayLcd);
Task_sleep(100000 / Clock_tickPeriod);
// Itse taikamenot
PIN_close(hButtonShut);
PINCC26XX_setWakeup(buttonWake);
Power_shutdown(NULL,0);
}
Int main() {
...
hButtonShut = PIN_open(&bStateShut, buttonShut);
if( !hButtonShut ) {
System_abort("Error initializing button shut pins\n");
}
if (PIN_registerIntCb(hButtonShut, &buttonShutFxn) != 0) {
System_abort("Error registering button callback function");
}
...
}
Tässä ei ole meille muuta erikoista, kuin että esitämme samalle pinnille kaksi eri konfiguraatiota. Toisessa
buttonShut on normaali painonapin toiminnallisuus ja toisessa buttonWake-rakenteessa alustetaan laitteen herätyskeskeytys (WakeUp) vakiolla PINCC26XX_WAKEUP_NEGEDGE. Homma toimii siten, että otamme keskeytyskäsittelijässä
buttonShutFxn napin painalluksen kiinni. Ensin poistamme napin käytöstä Pin_close-funktiolla ja sitten alustamme sen uudelleen herätysnapiksi funktiolla PINCC26XX_setWakeup ja sen jälkeen virrat pois funktiokutsulla Power_shutdown. Laite ei kuitenkaan kirjaimellisesti katkaise virtoja, vaan jää vähäenergiseen odotustilaan (sleep) ja herää siitä kun nappia uudelleen painetaan, joka lähettää herätyskeskeytyksen MCU:lle. MCU käynnistää sitten ohjelman suorituksen main-funktion alusta. Käytännössä siis laite resetoituu. Patterin jännite¶
RTOS tarjoaa meille alemman tason makron
HWREG, jolla pystymme lukemaan suoraan MCU:n muistista rekisterien arvoja. Makroa käyttäen kolikkopatterin jännitteen kertovan rekisterin arvo luetaan seuraavasti:uint32_t patteri = HWREG(AON_BATMON_BASE + AON_BATMON_O_BAT);
Tässä vakiot AON_BATMON_BASE + AON_BATMON_O_BAT osoittavat rekisterin muistipaikkaan.
Muistetaan rekisterin arvon (ts. 32-bittisen binääriluvun) muuttaminen jännitteeksi seuraavasti. Meitä kiinnostaa siis kokonaisosan bitit
10-8 ja reaaliosan kertovat bitit 7-0. Nyt realiosan tarkkuus on siis 256 (2^8) eri jännitearvoa. 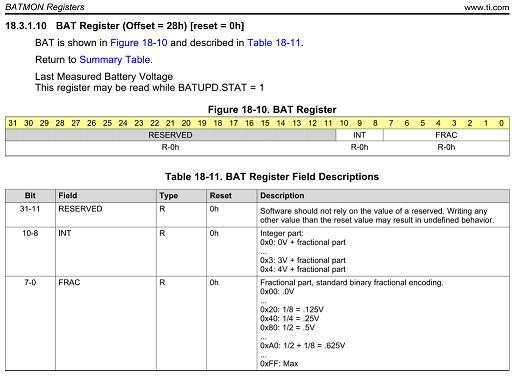
Lopuksi¶
Monissa muissa sulautetuissa laitteissa MCU:hun on integroitu haihtumatonta EEPROM-muistia, sitä SensorTag:issa ei jostain syystä valmiina ole. Tätä muistia olisi voitu käyttää tietojen tallennukseen MCU:lle niin että se säilyy virrankatkaisujen yli. Tosin laitteen ohjelmamuistiin on mahdollista kirjoittaa myös dataa.
Näillä eväillä pystytään jo laatimaan varsin monimutkaisia ja monipuolisia ohjelmia SensorTag-laitteelle! Tässä on oikeastaan kaikki mitä kurssilla laitteen ohjelmoinnista täytyy osata. Paitsi langaton tiedonsiirto, joka tulee ensi luennoilla. Kuten olemme huomanneet, RTOS todellakin abstrahoi meille vaikeita ominaisuuksia helposti käytettäviksi kirjastojen ja valmiiden funktiokutsujen kautta.
Anna palautetta
Kommentteja materiaalista?